Gradient


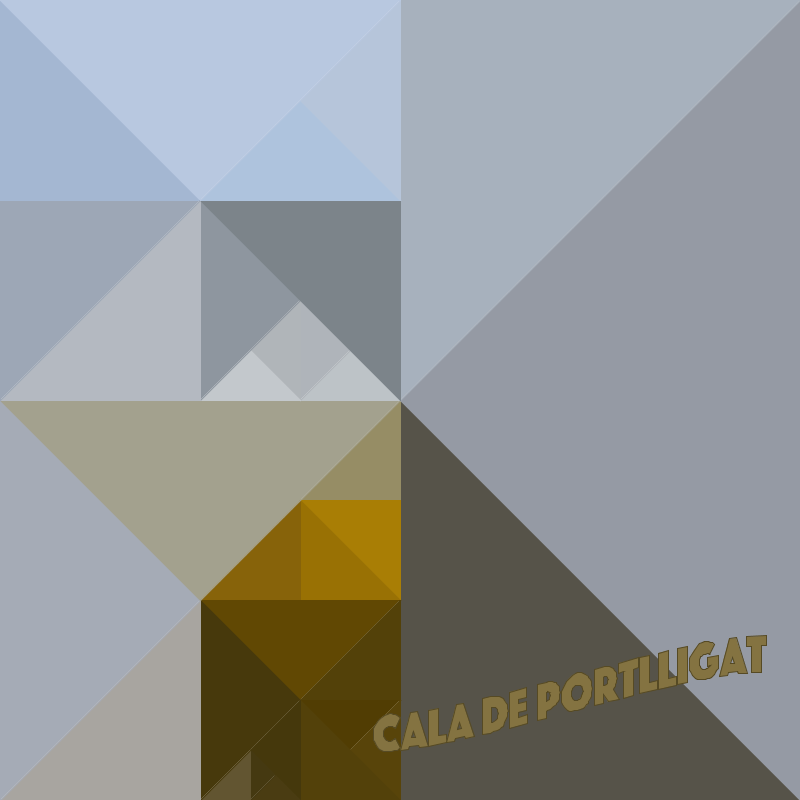

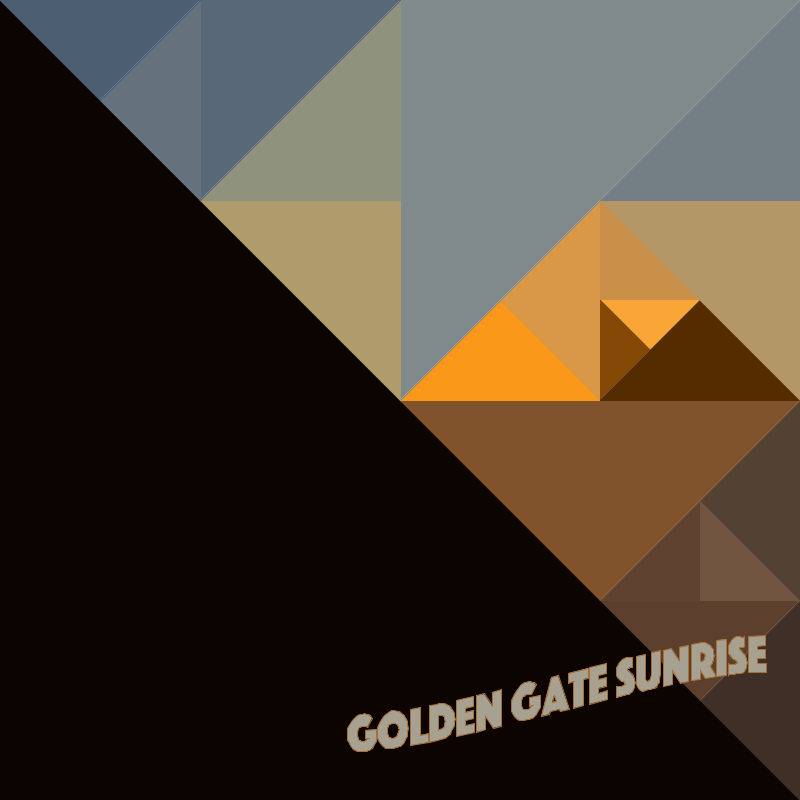




Surface currents from nine SF Bay Area HR Radar stations.
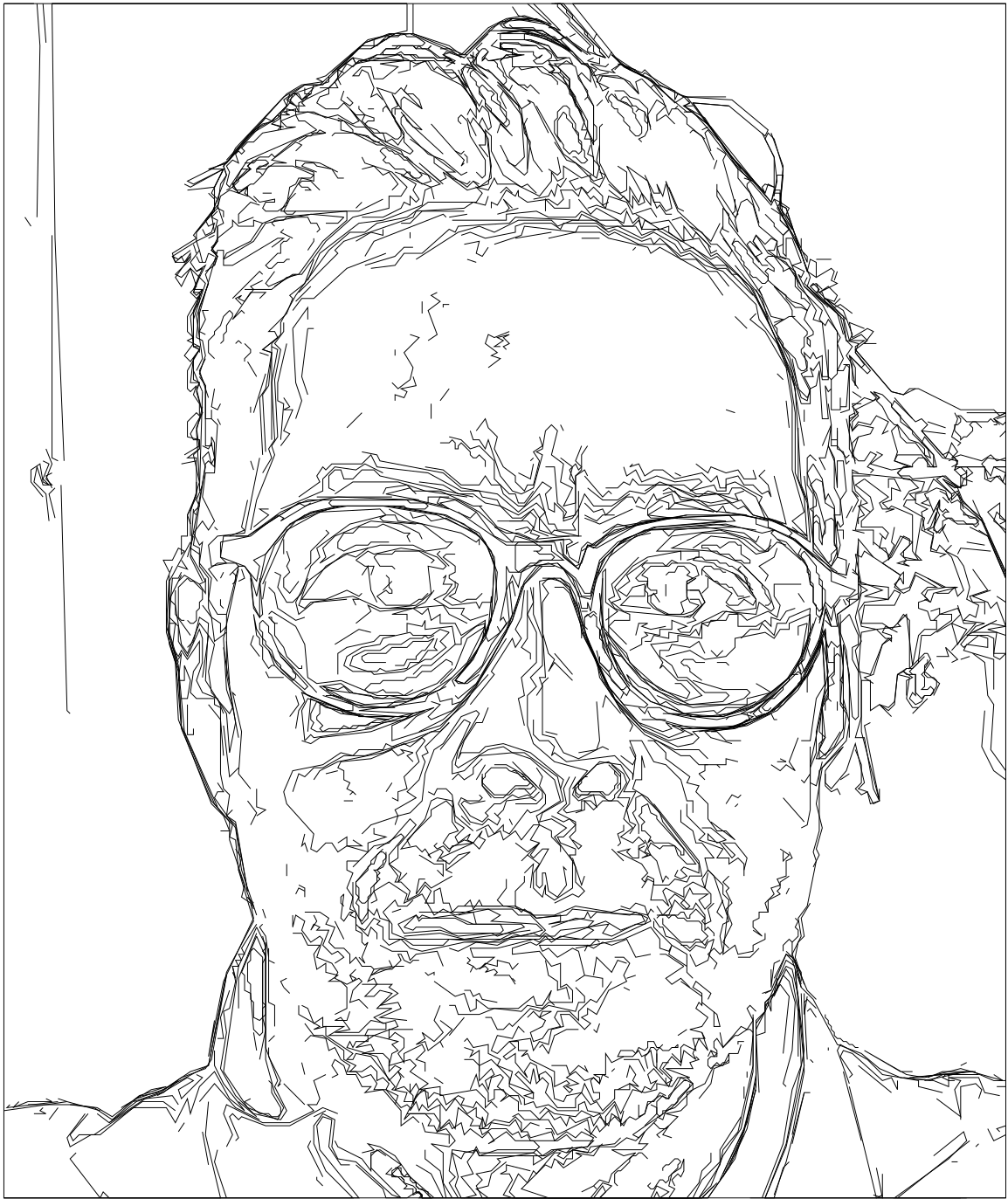
Face illustrations generated using a simple substitution grammar and then plotted to paper.


Detail:

A couple times in the pass, I have looked into ways to algorithmically generate lines suitable for plotting based on an image. Now that I have finally built a plotter to test them out, I decided to take another pass.
As in previous cases, I started with OpenCV contours generated from threshold images, as seen in the image below.

As it is, there is something compelling about this, but there is a lot of noise. The areas of the image where the contour lines stack up close to each other are areas where the brightness of the image change quickly. My assumption what that these represent good lines to focus on for the illustration and my first step was to filter out the other lines. Below is the result of keeping only points that are within a set range of another point. I also remove any of those points within range if they are really close to the point I am keeping. The ideal distances to use for this vary from image to image, but I was interested to see if there were some settings that worked fairly well for a variety of image. The image below is the result of these generic settings that work across many images.
There are still quite a few extra lines here, so I wrote a few more filters to remove particularly jaggy points from the lines, remaining remaining fragments that are really short. Next, I merged any lines whose endpoints were particularly close to each other (to reduce unnecessary pen lifts) before making a final pass to remove lines that don’t much area of the illustration. The results of each of these filters is included below.




The final results are ok, but the number of paths is higher than I would like (263 paths in the example above). Filtering out more of the paths is possible, but key details start to get lost depending on the specific nature of the image being used. A genetic algorithm could be used to fine tune the filter settings for each image, or you could import the SVG into Inscape and just manually remove the lines you don’t like.
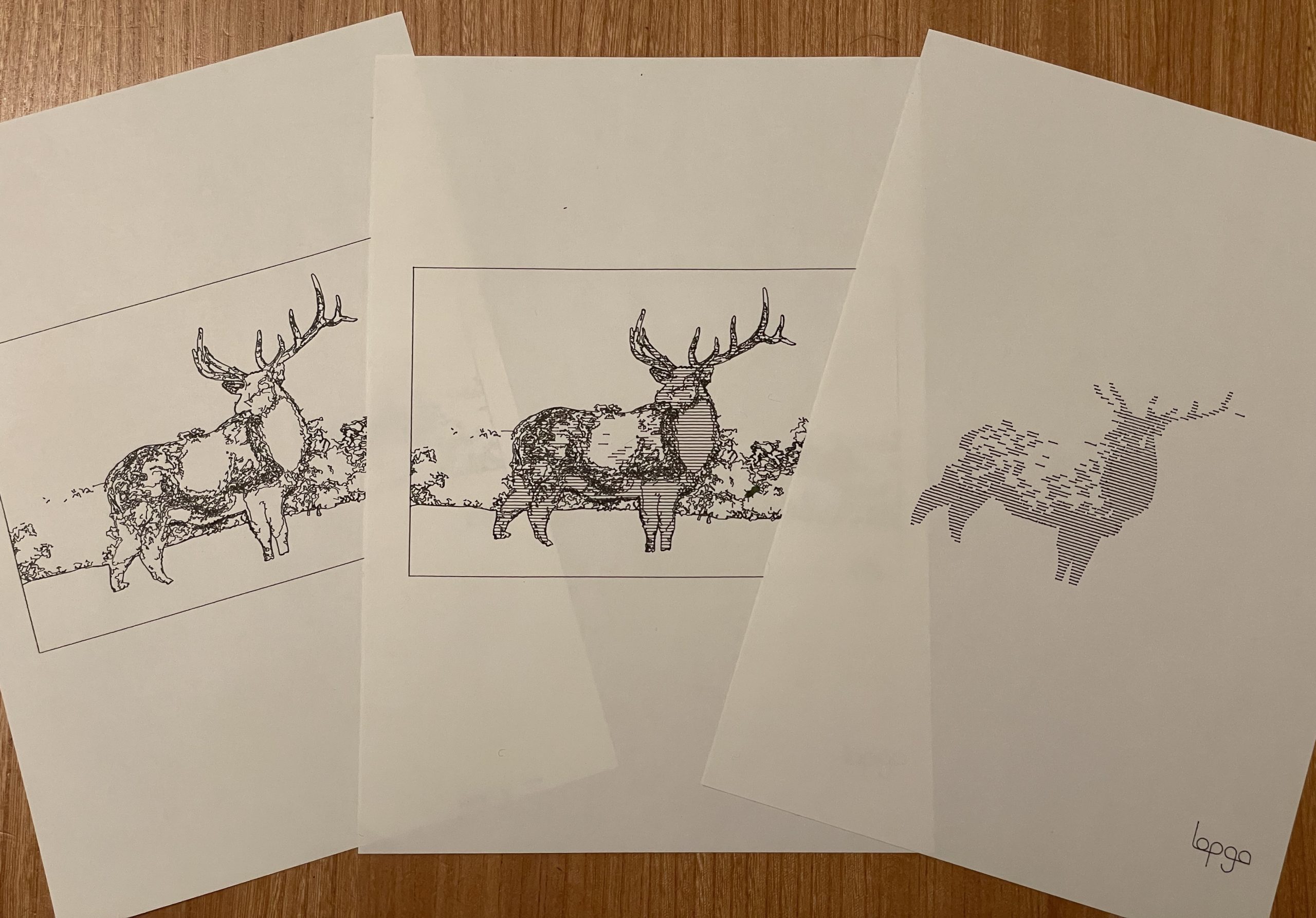
For now, I decided to toss in some some hatch shading and call it a successful experiment. Below are some plotted results with and without shading.



I’ve been working on a shape grammar that generates a sequence that can then be run through a genetic algorithm. These images were generated using two shapes and a simple set of rules. Parameters of the rules are randomized when the composition is created and saved to a sequence that will be later be integrated into a genetic algorithm.







The spirographs above were created by a genetic algorithm. A collection of 36 compositions is generated at random and placed (by me) into three categories: top, mid, and bottom tier. Pulling most often from the top tier, second most from the mid, and least often from the bottom tier, a random sample of compositions (allowing for duplicates) is drawn from the 36. These selections are carried forward to the next generation. Within each new generation, individual compositions trade some of their parameter values (genetic code) with another composition and then some random mutations are inserted. The code-swap provides cross polarization, allowing attributes to be shared among the population. Mutations inject new twists, sometimes favorable, sometimes not so much. The resulting 36 compositions are then viewed and sorted to evolve the next generation.
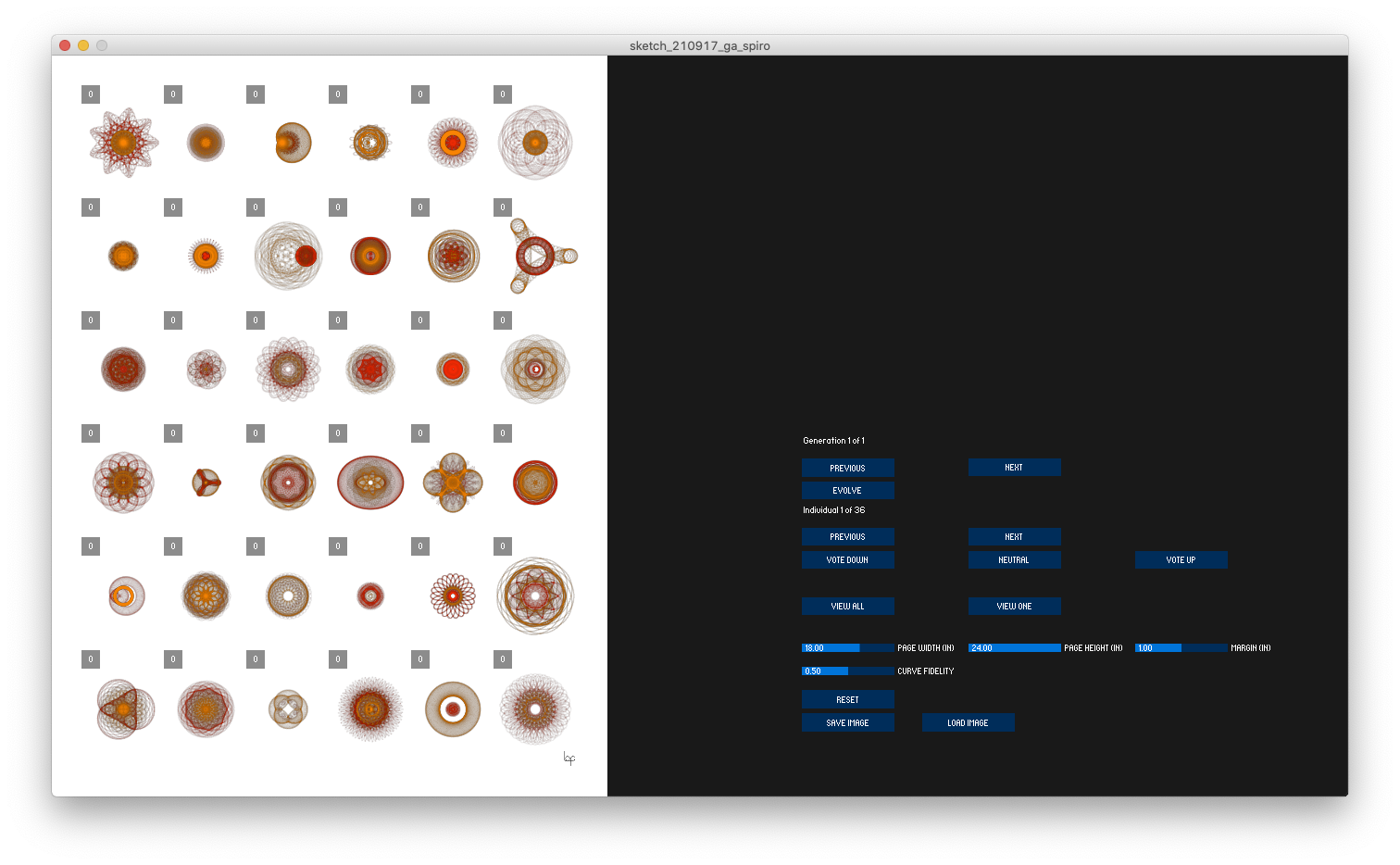
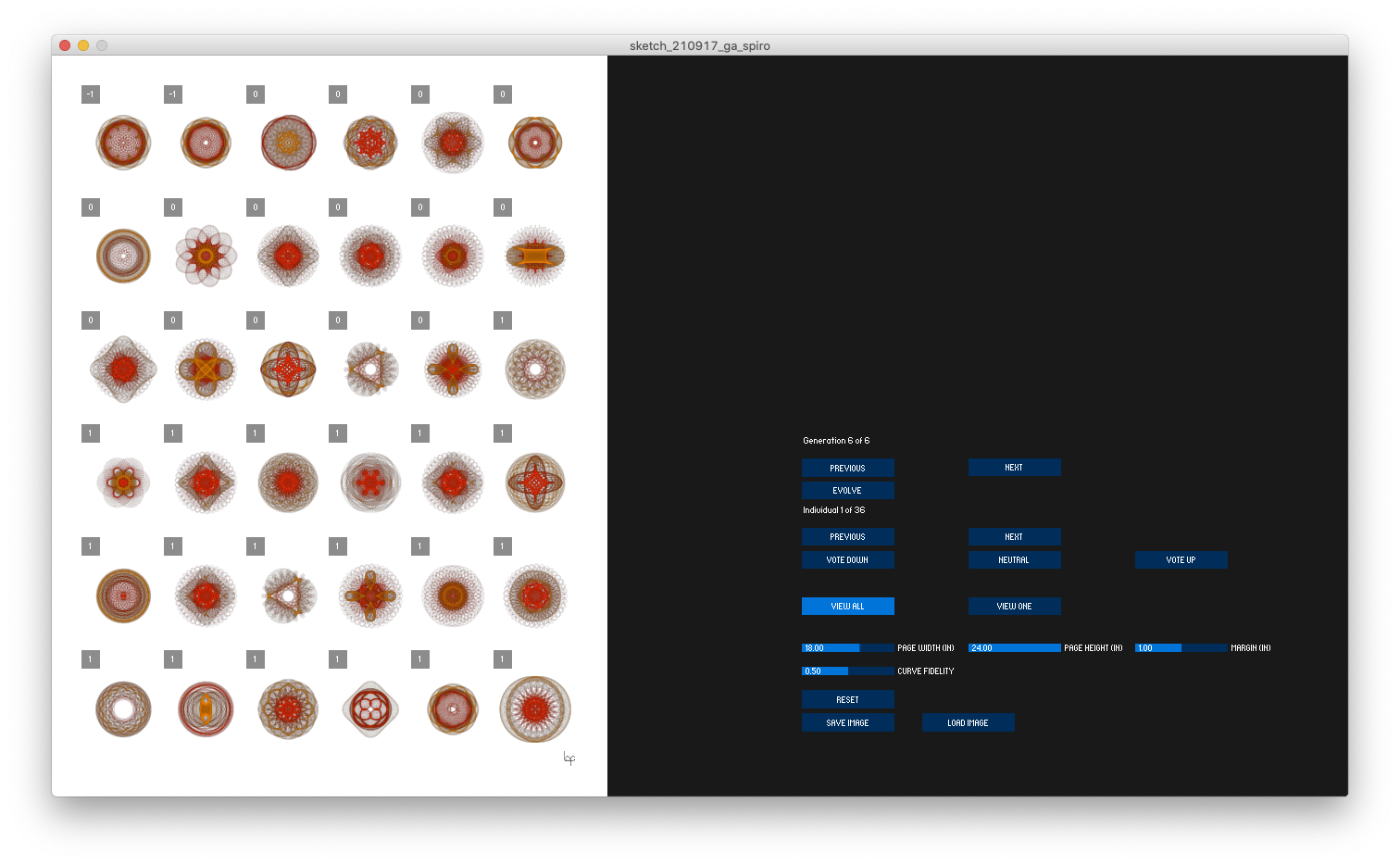
Typically, in a genetic algorithm, an automated scoring algorithm would determine the fitness of each composition. The human involvement in the process allows the evolution to proceed more editorially.
It is a quick way to visually search through a parameter space. By selectively upvoting compositions of interest, one can create a population with variations on themes of interest. The process is a collaboration between algorithms, tools, and the composer.