Face illustrations generated using a simple substitution grammar and then plotted to paper.


Detail:

Face illustrations generated using a simple substitution grammar and then plotted to paper.
Detail:
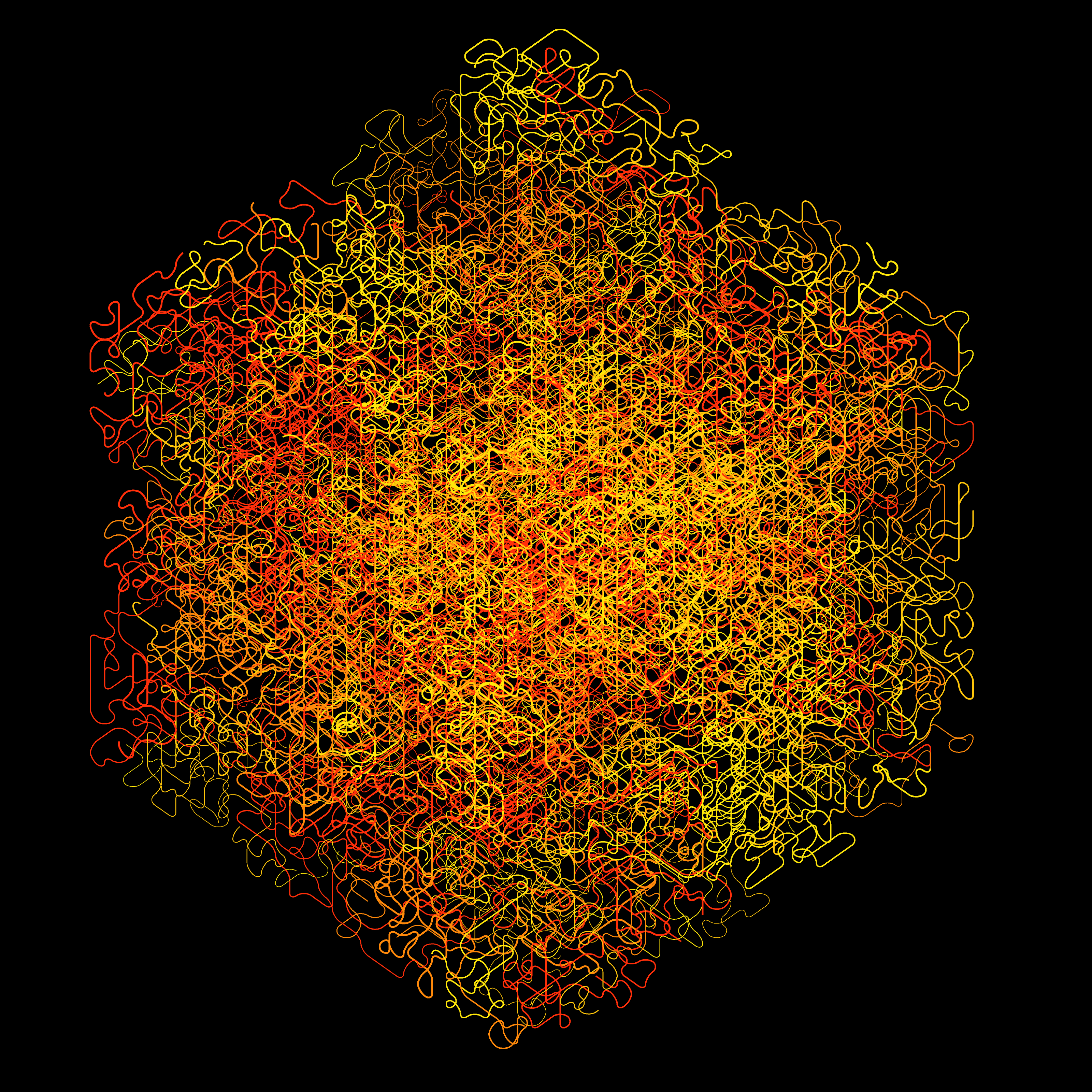
A couple times in the pass, I have looked into ways to algorithmically generate lines suitable for plotting based on an image. Now that I have finally built a plotter to test them out, I decided to take another pass.
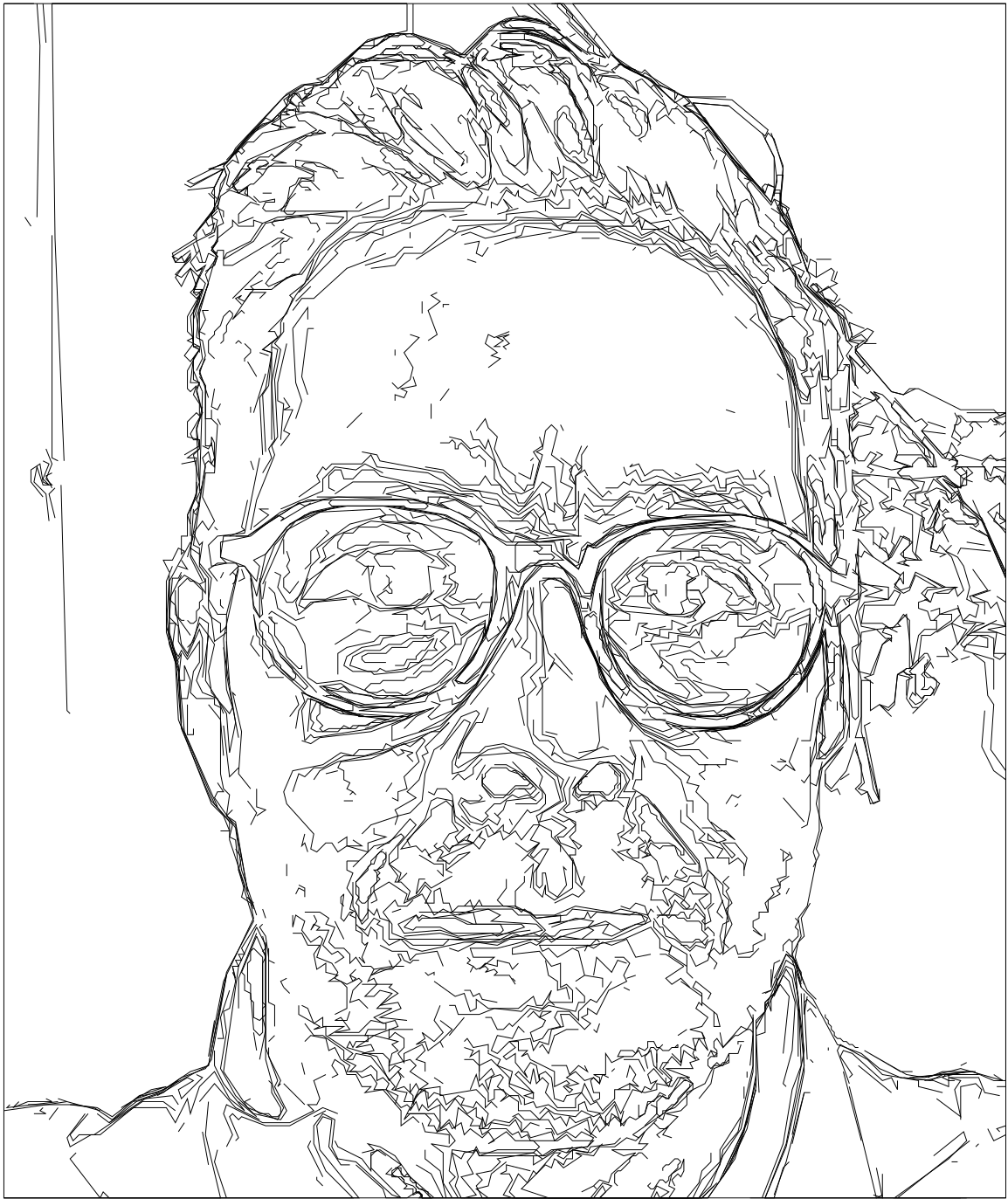
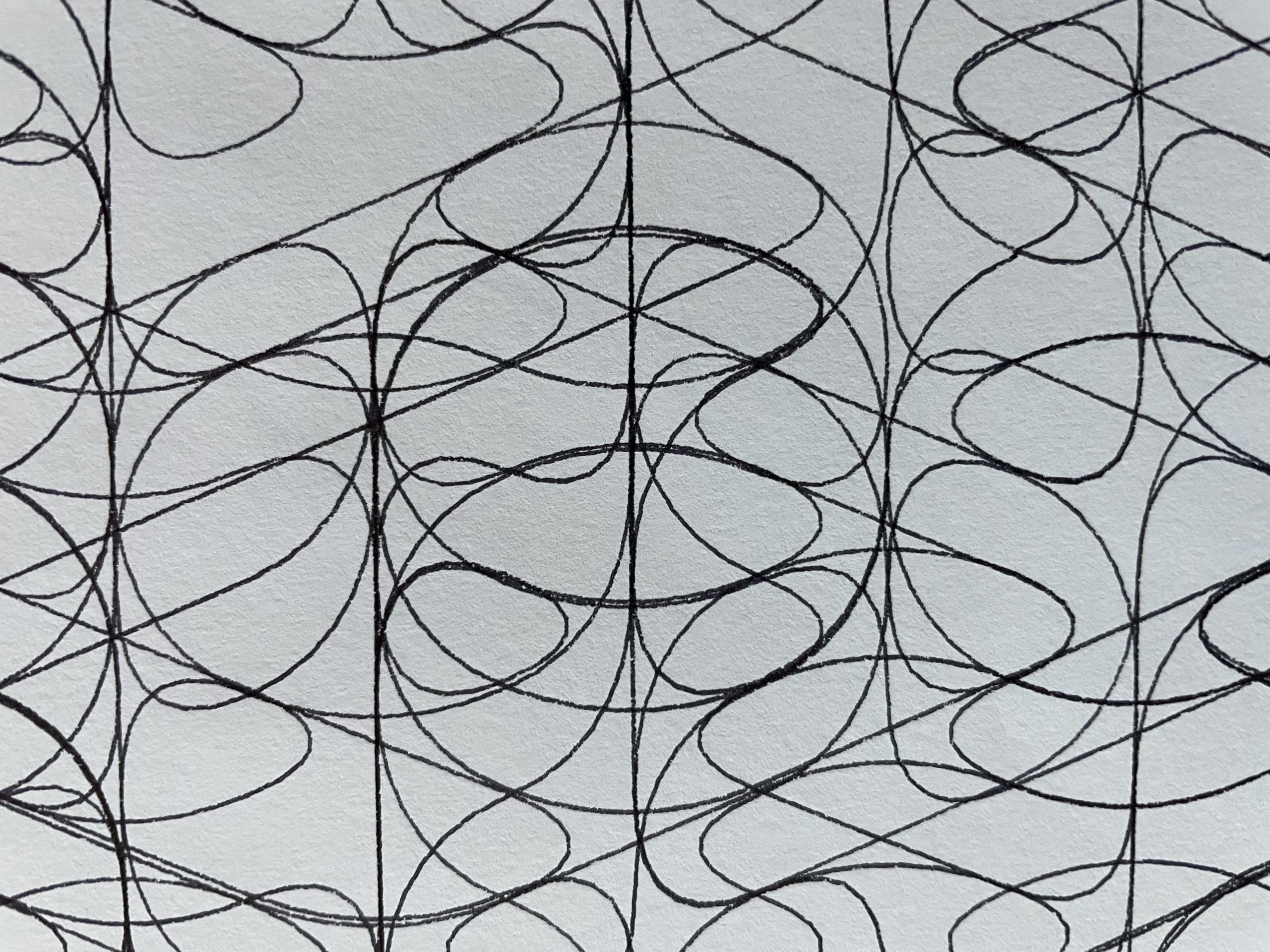
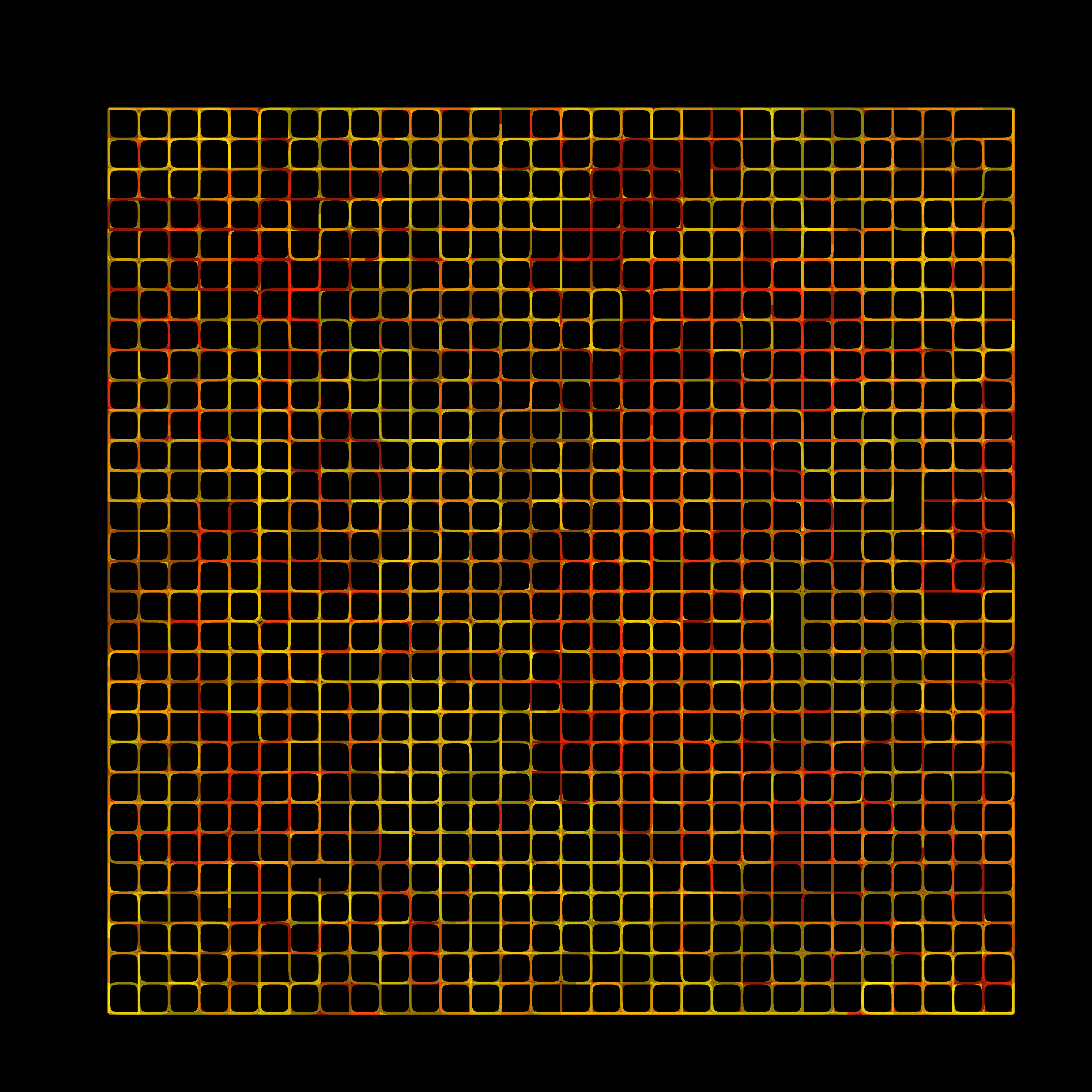
As in previous cases, I started with OpenCV contours generated from threshold images, as seen in the image below.

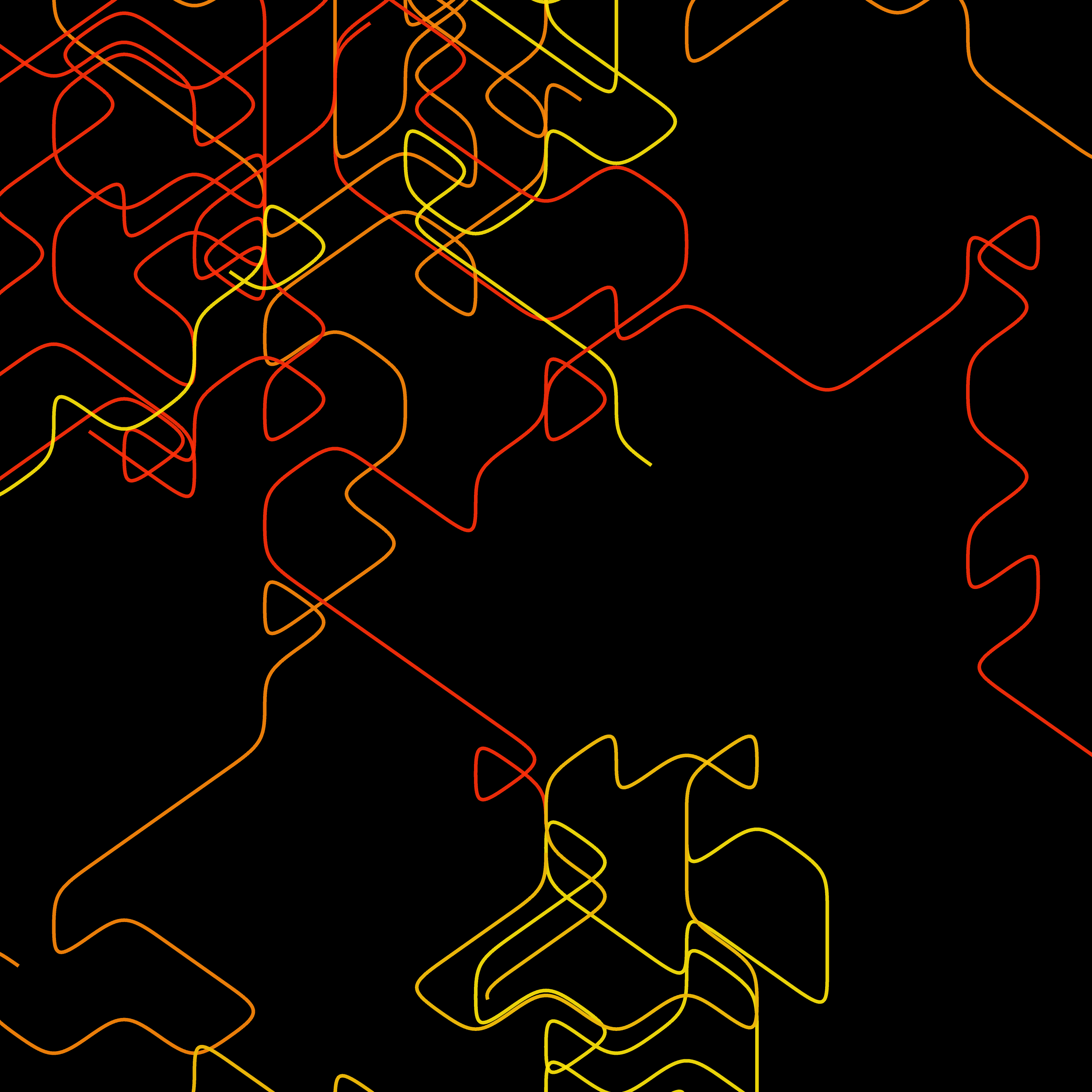
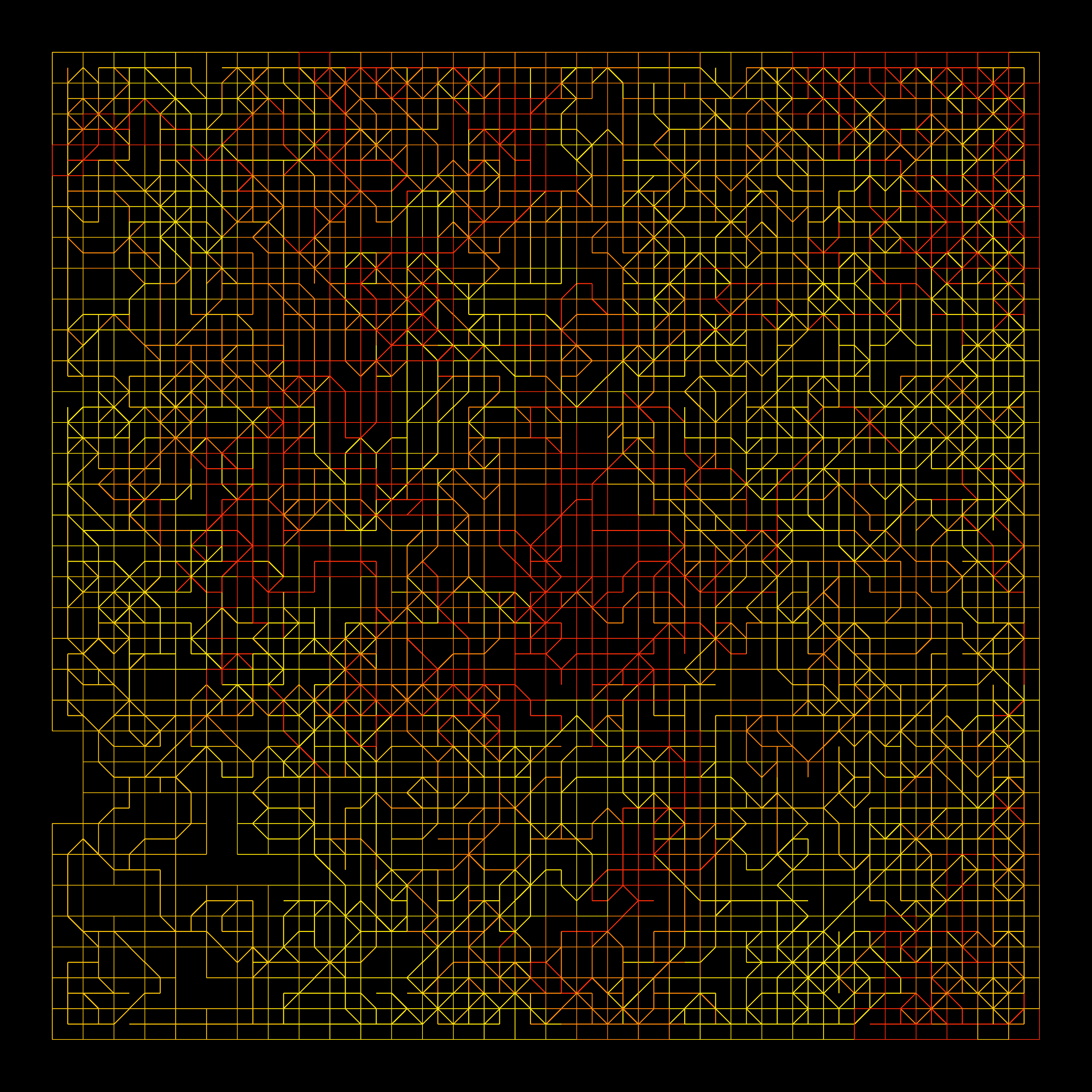
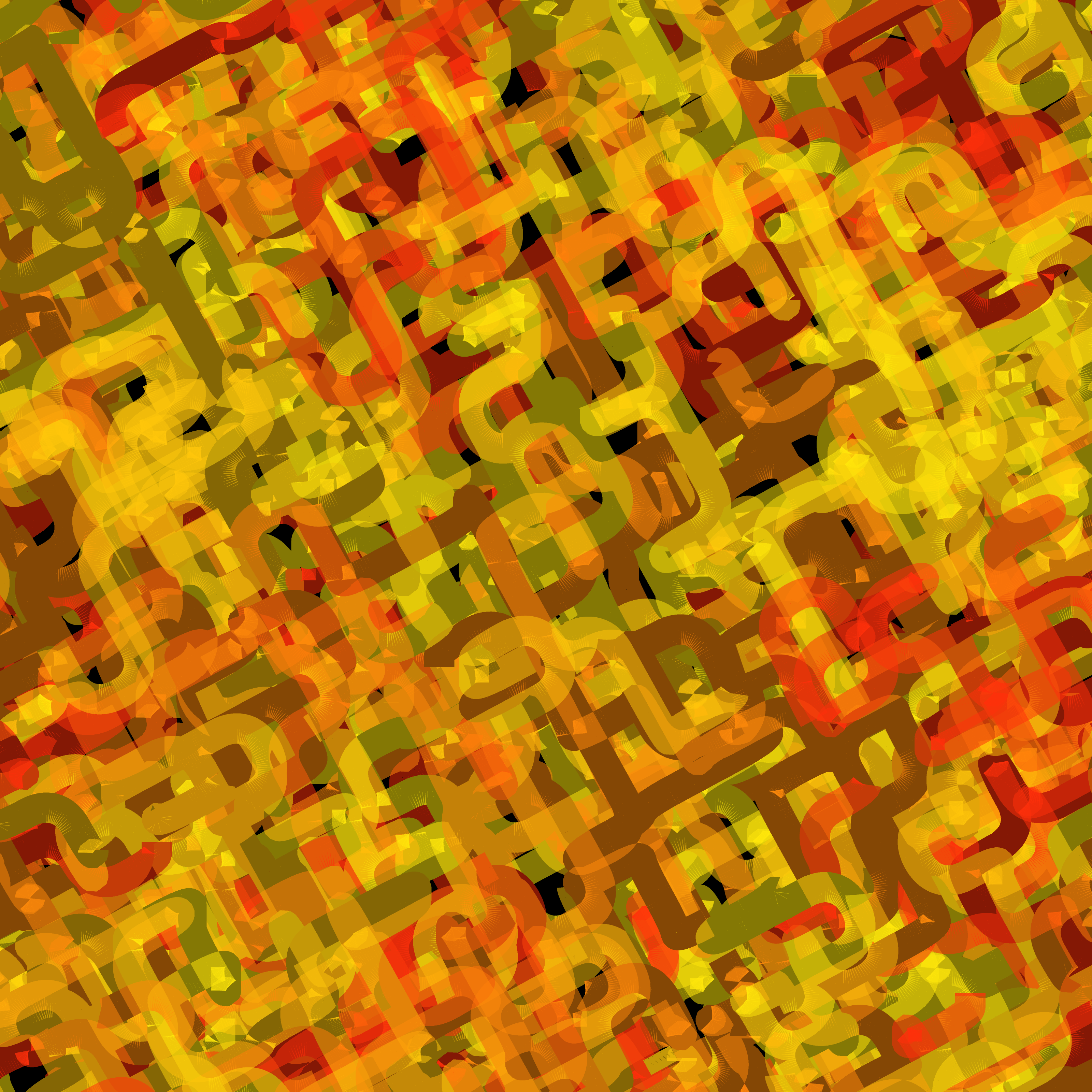
As it is, there is something compelling about this, but there is a lot of noise. The areas of the image where the contour lines stack up close to each other are areas where the brightness of the image change quickly. My assumption what that these represent good lines to focus on for the illustration and my first step was to filter out the other lines. Below is the result of keeping only points that are within a set range of another point. I also remove any of those points within range if they are really close to the point I am keeping. The ideal distances to use for this vary from image to image, but I was interested to see if there were some settings that worked fairly well for a variety of image. The image below is the result of these generic settings that work across many images.
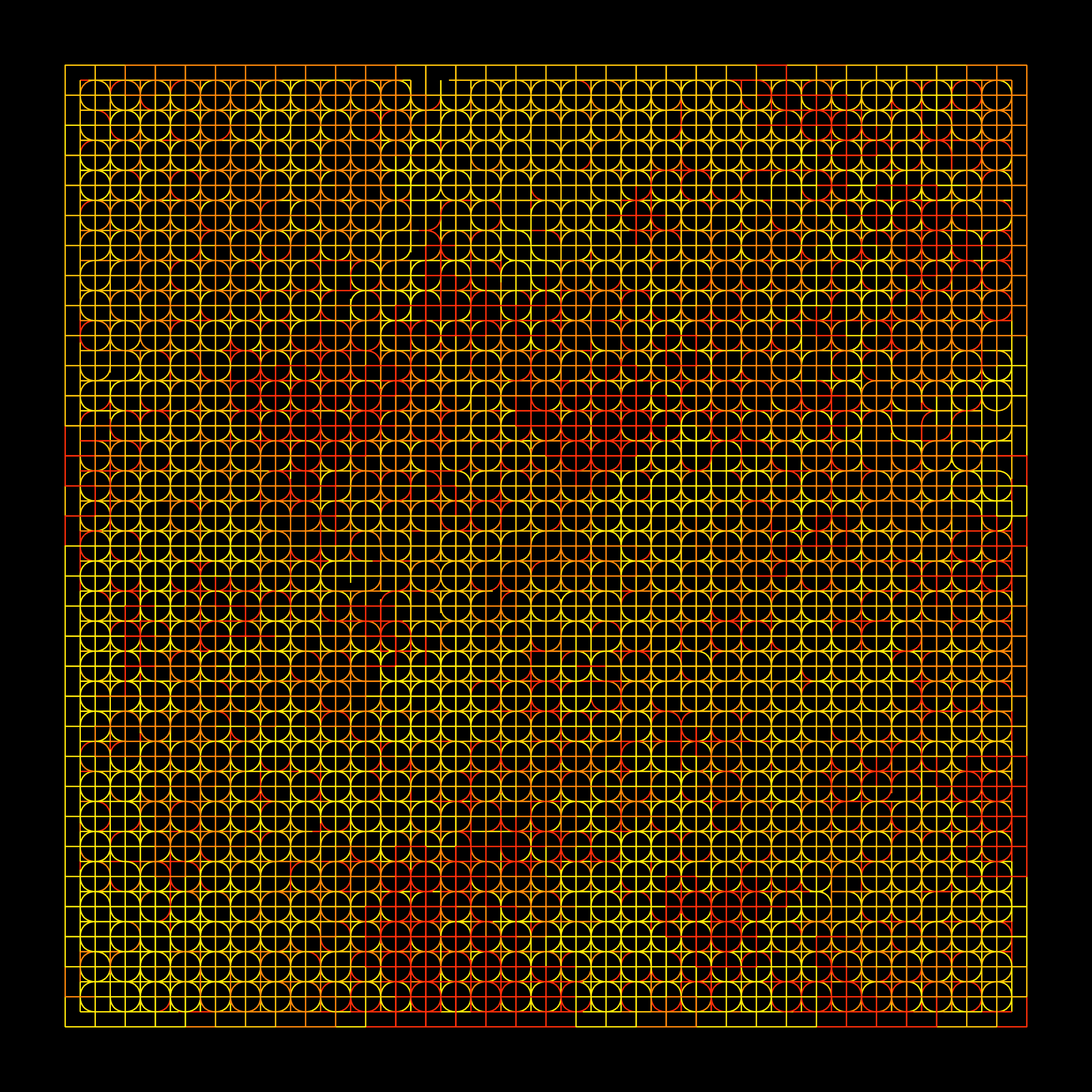
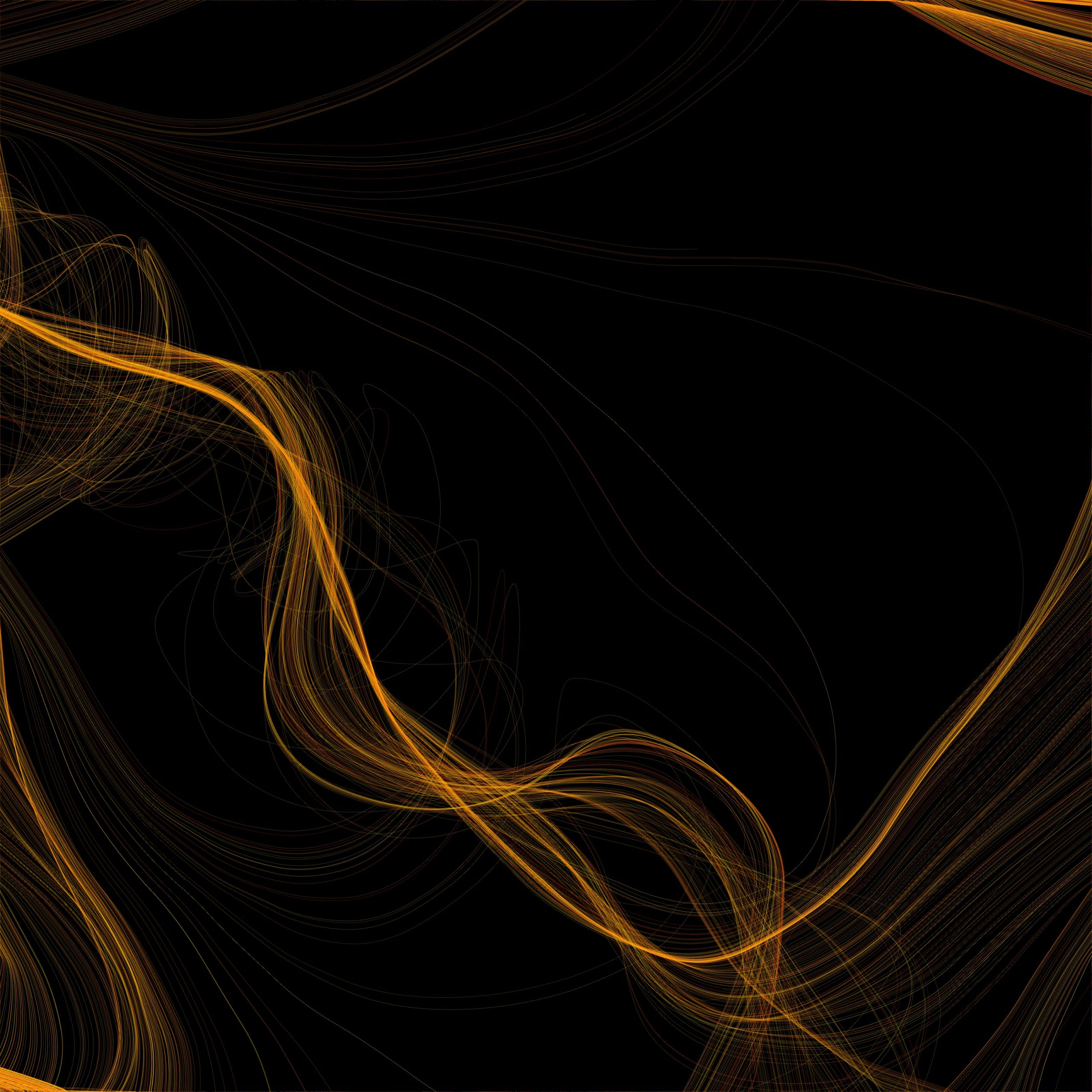
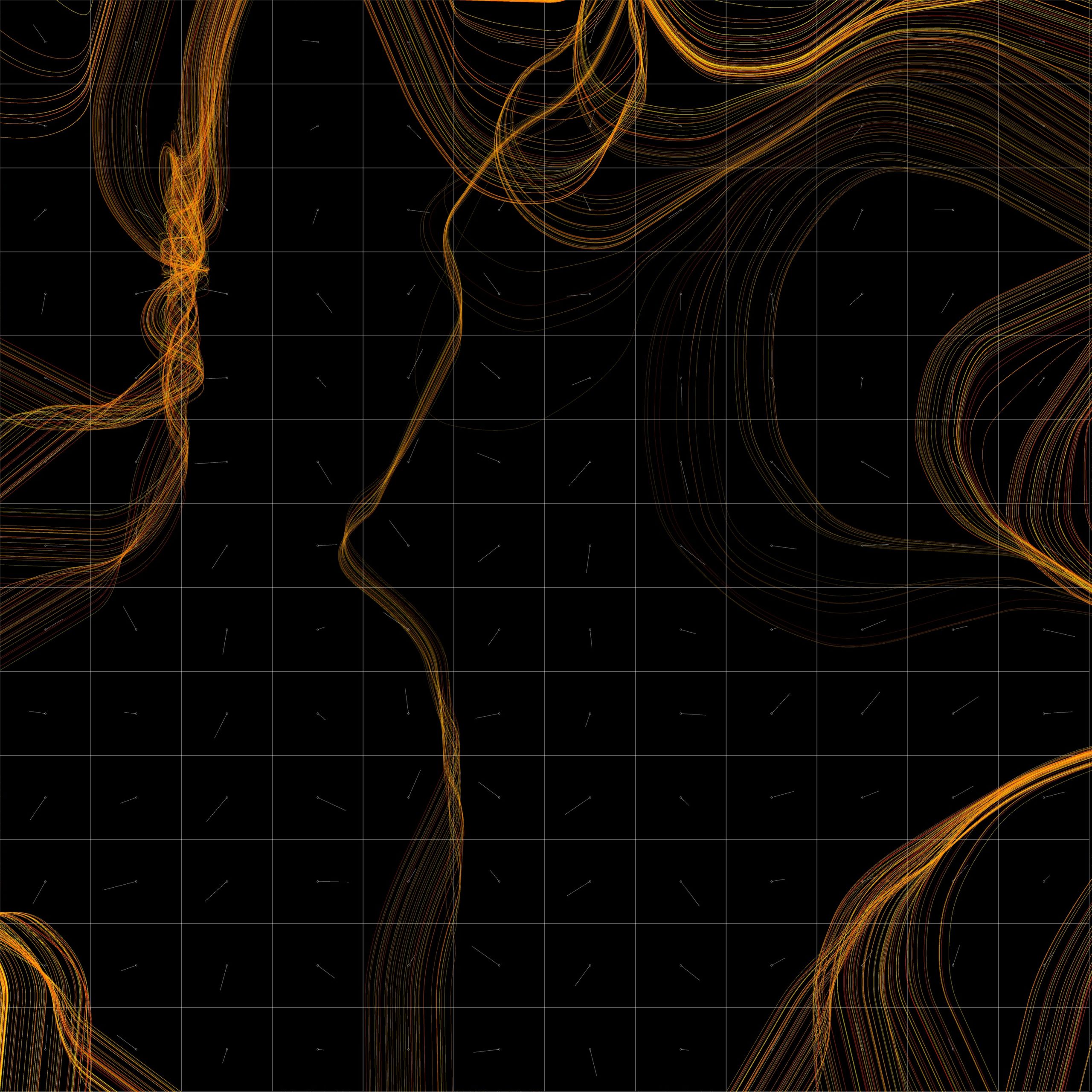
There are still quite a few extra lines here, so I wrote a few more filters to remove particularly jaggy points from the lines, remaining remaining fragments that are really short. Next, I merged any lines whose endpoints were particularly close to each other (to reduce unnecessary pen lifts) before making a final pass to remove lines that don’t much area of the illustration. The results of each of these filters is included below.




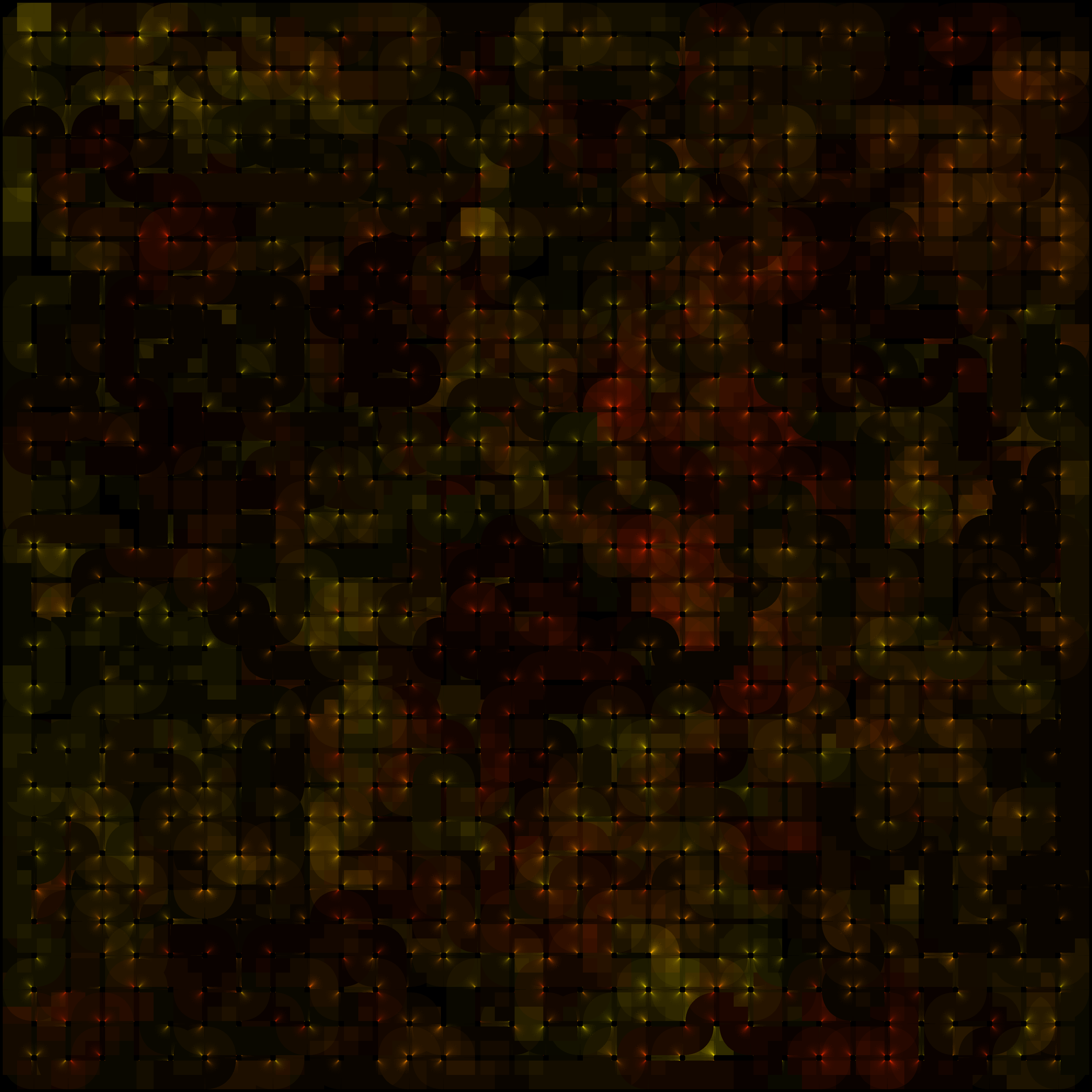
The final results are ok, but the number of paths is higher than I would like (263 paths in the example above). Filtering out more of the paths is possible, but key details start to get lost depending on the specific nature of the image being used. A genetic algorithm could be used to fine tune the filter settings for each image, or you could import the SVG into Inscape and just manually remove the lines you don’t like.
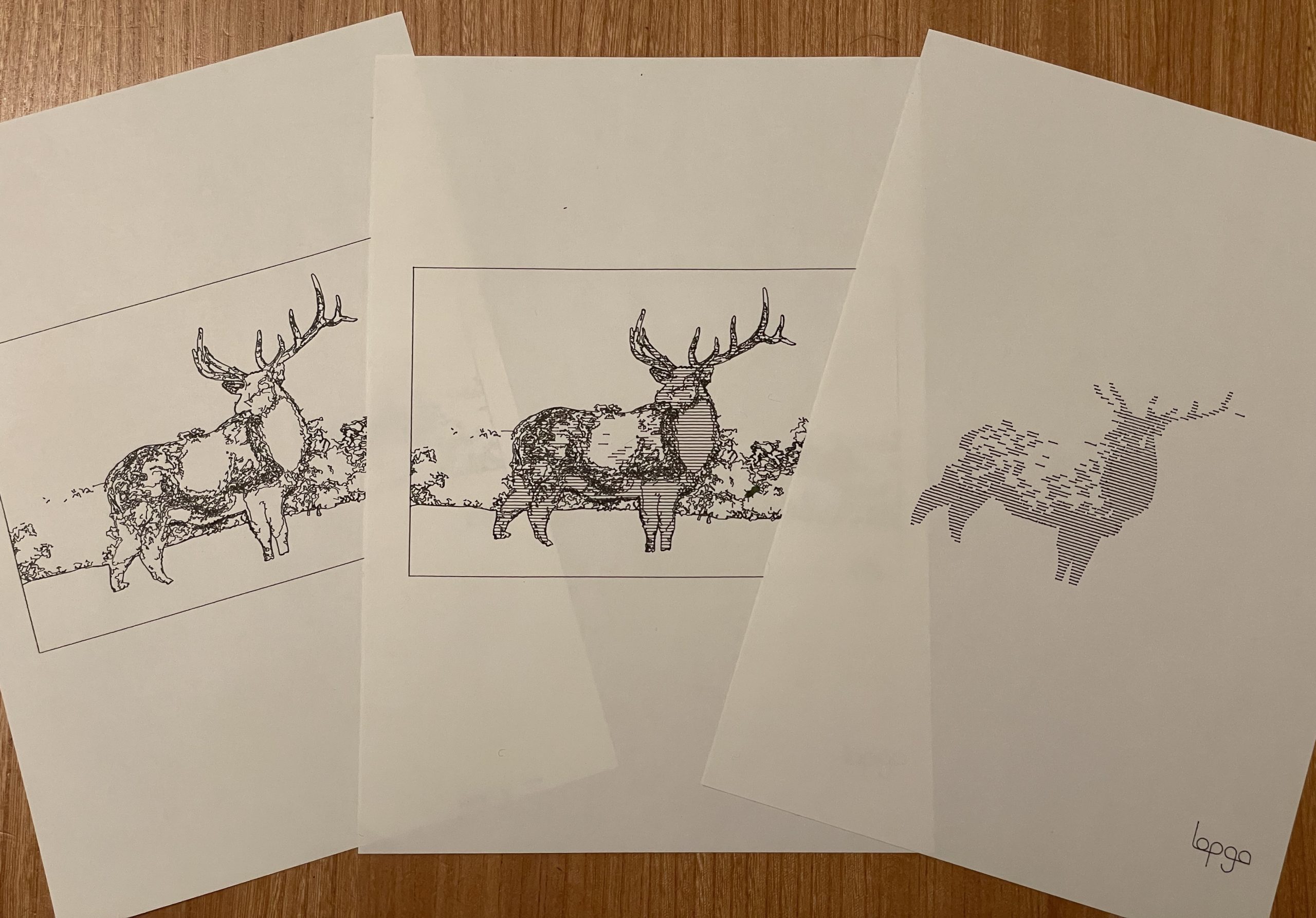
For now, I decided to toss in some some hatch shading and call it a successful experiment. Below are some plotted results with and without shading.



I’ve been working on a shape grammar that generates a sequence that can then be run through a genetic algorithm. These images were generated using two shapes and a simple set of rules. Parameters of the rules are randomized when the composition is created and saved to a sequence that will be later be integrated into a genetic algorithm.







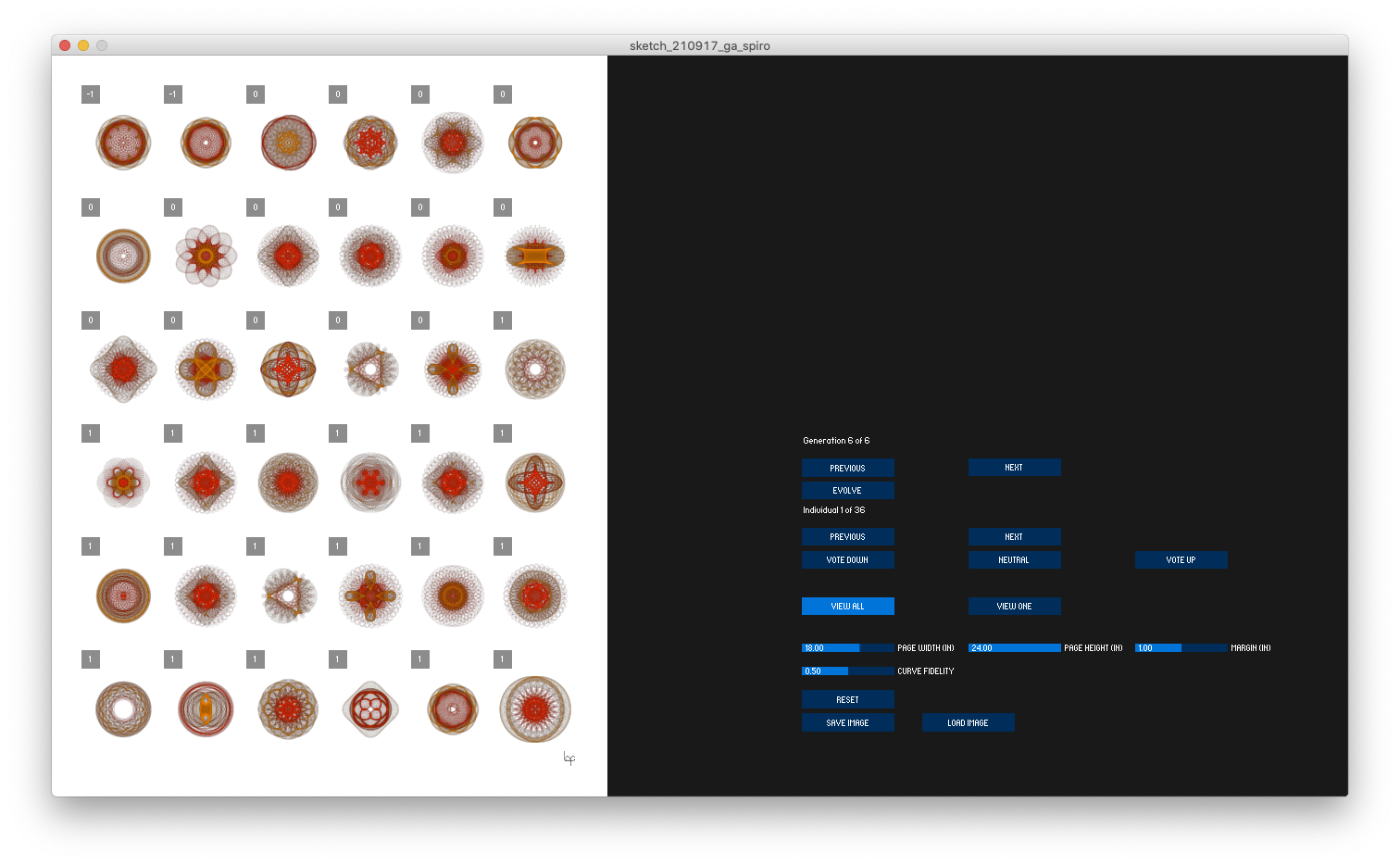
The spirographs above were created by a genetic algorithm. A collection of 36 compositions is generated at random and placed (by me) into three categories: top, mid, and bottom tier. Pulling most often from the top tier, second most from the mid, and least often from the bottom tier, a random sample of compositions (allowing for duplicates) is drawn from the 36. These selections are carried forward to the next generation. Within each new generation, individual compositions trade some of their parameter values (genetic code) with another composition and then some random mutations are inserted. The code-swap provides cross polarization, allowing attributes to be shared among the population. Mutations inject new twists, sometimes favorable, sometimes not so much. The resulting 36 compositions are then viewed and sorted to evolve the next generation.
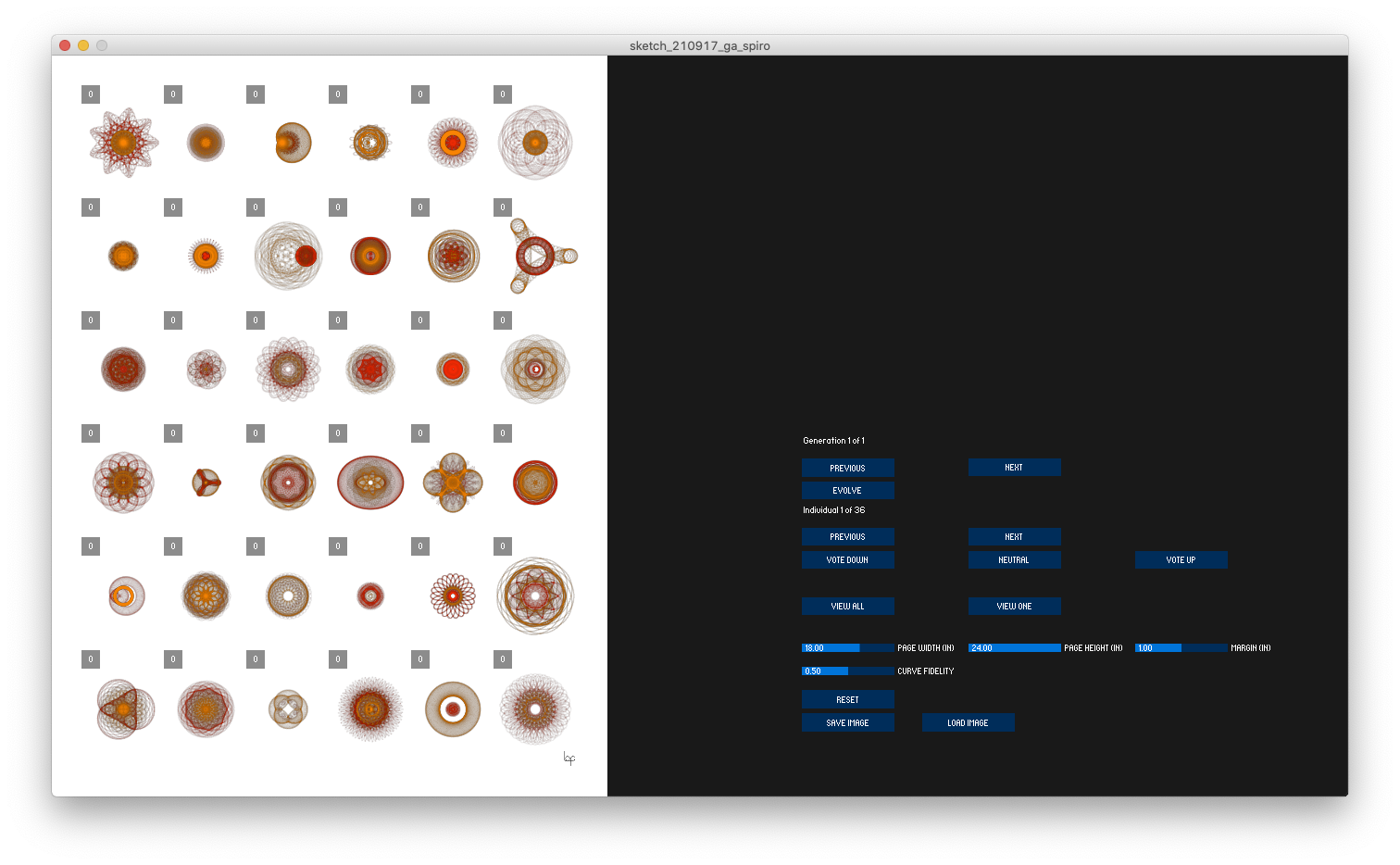
Typically, in a genetic algorithm, an automated scoring algorithm would determine the fitness of each composition. The human involvement in the process allows the evolution to proceed more editorially.
It is a quick way to visually search through a parameter space. By selectively upvoting compositions of interest, one can create a population with variations on themes of interest. The process is a collaboration between algorithms, tools, and the composer.


For a while now, I’ve wanted to draw some of my line drawings onto large format paper and I’ve finally built myself a vertical plotter. There are several great tutorials online for building plotters that suspend a drawing gondola from two motors, use polar coordinates to control how the gondola travels, and a servo motor to raise and lower the pen. The video below shows a complete test plot on my plotter.
Much of the inspiration for the design of the penelope’s gondola, came from MTvplot. Like MTvplot, I decided to use large bearings with attached arms that rotate around a central point where the pen is placed. Keeping the pen tip in the center like this increases the accuracy of the plot. As the gondola moves left to right, the body of the gondola tends to rotate a bit relative to the the paper (for example, due to cable drag). With the tip at the center of rotation, the tip remains in the same place as the body rotates. Below are images of the first version of my gondola which is missing the weight I added in a later version.



To be able to easily adjust the width of my the plot area, I designed the motor mounts to hang from some picture rails already in my space. Within these mounts, I included smaller bearings to apply pressure to the belt and help hold it in contact with the teeth of the pulleys. I saw a similar detail in one of the online examples, but I can’t find the reference again.


For the counterweights, I settled on using pennies and printed cylinders to hold them. One of the benefits of this approach is that I was able to easily tune the weight by adding and removing pennies. At first, I tried to weigh the gondola only using the bearings (v1 pictured earlier), but I found that they did not provide enough stabilization when the distance between the gondola and motors was greater (for example, the bottom third of my 18×24 inch paper). This resulted in some shaky lines when drawing tight curves near the bottom of the page. To improve stability, I added a cylinder to hold pennies to v2 of gondola.


To help hold the pen with the tip at the center of the bearings and, when possible, at an angle to let ink flow down, I created a general purpose guide. This guide, is useful for quickly testing different pens, but proved difficult to set up accurately. I then created specific inserts to hold pens I plan to use regularly.


update: STL files available on Thingiverse.
For the hardware needed to control the motors, I first started with these two tutorials: https://www.instructables.com/Vertical-Plotter/ and https://www.youtube.com/watch?v=T0jwdrgVBBc. I liked the simplicity of using the motor shield and Arduino Uno — plus I already had that hardware. In the end, I got it working, but the pen traveled too slow to be useful. A friend recommended PenPlotter which uses a board specifically designed for controlling 3d printers. With this hardware, the PenPlotter software and the Repetier firmware included in the PenPlotter repo, I was able to get penelope drawing well.

Hardware shopping list:
The PenPlotter software requires some plotter-specific settings. For my current installation, they are:
PenPlotter includes several options for rendering images as a line drawing, but I am using it to draw SVG files. I am using Processing to programmatically create the SVG files. With Processing, there are some default ways to export SVG. The first is to record all shapes that are draw to the screen. The second option is to create an SVG PGraphics object and draw into it. Both of these options work well for 2d shapes, but ignore 3d shapes. The third option is to use beginRaw and capture everything drawn to the screen, including 3d shapes. Unfortunately, this process breaks the 3d shapes into very short lines, each its own line object in the final SVG file. PenPlotter generates a pen down and up for each of these lines in the drawing, resulting in long plot time and ink bleed at the start and end of each line.
So far, I have found the best option is creating an SVG PGraphics object and manually converting 3d shapes to 2d shapes using the screenX and screenY functions. This gives me me the best control over when the pen lowered and raised. It also gives me the ability to more easily crop shapes fit within the page boarder.
In the past, I have used PGraphics to generate high resolution PNG files offscreen and then preview them onscreen at a lower resolution. For penelope, I expanded this approach, adding a second PGraphics object to draw 3d shapes into in order to extract screenX and screenY values to use to draw 2d shapes into a separate PGraphics object. I can then preview this drawing onscreen and adjust the composition to my liking. Once I have a version that I want to plot, an SVG PGraphics object is created to draw the same 2d shape data to export the drawing to an SVG file for PenPlotter.
I use Processing’s beginShape, vertex, and endShape functions to define my lines point-by-point. For each shape made this way, PenPlotter will lower the pen, draw a series of lines connecting each point and then raise the pen. This is an easy way to control when PenPlotter sends pen down and up commands to penelope.
I found that by setting the dimensions of the offscreen PGraphics object (in pixels) to 71.95 times the dimensions of my paper (in inches), the exported SVG file is the correct size to be drawn at the default scale of PenPlotter.
I’m pleased with the initial drawing results from penelope. I’ve run into some issues, but have been able to mitigate many of them. The overall accuracy of the lines is great.

I did have some issues, especially when drawing near the bottom of the page and when drawing curves consisting of many smaller lines. These issues included:
Below is another video, this one showing parts of 2 hour plot. If you’ve built a similar plotter and have tips for me, please leave them in the comments below.






































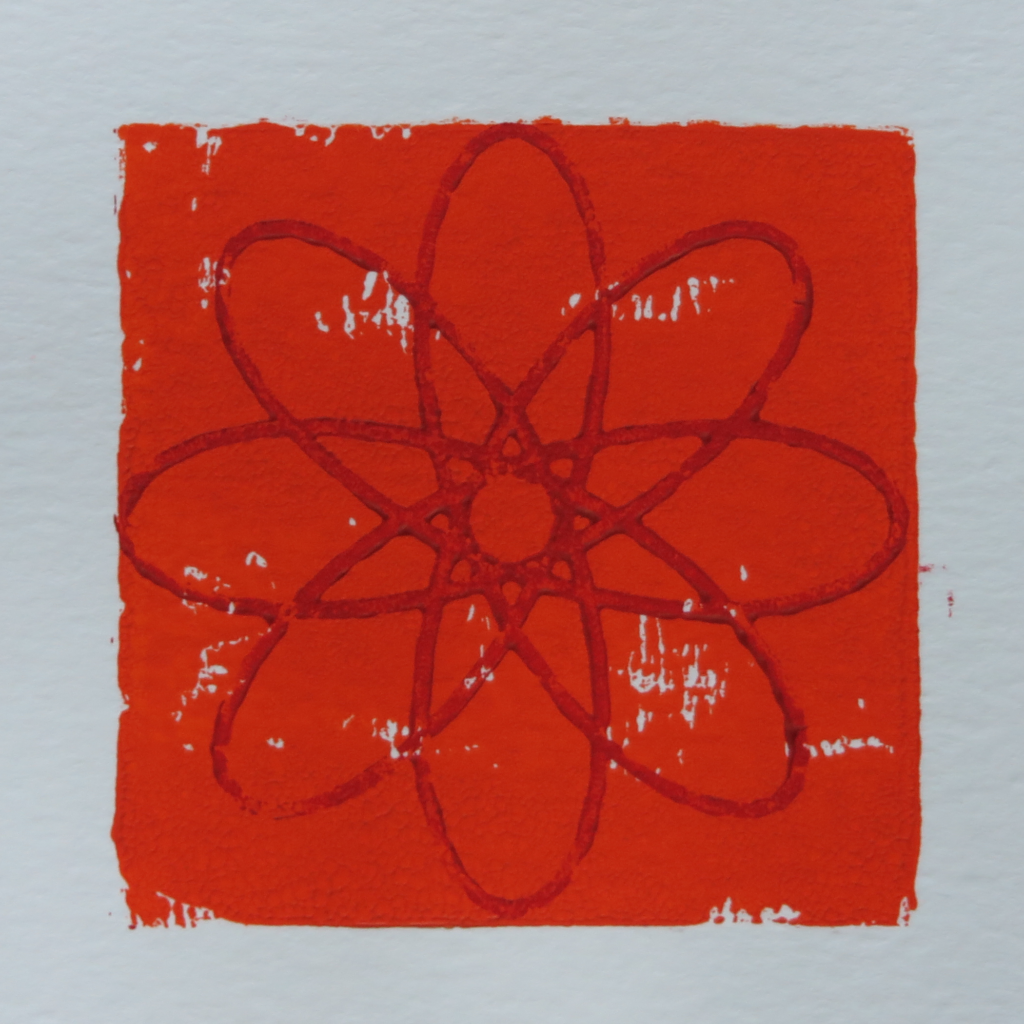
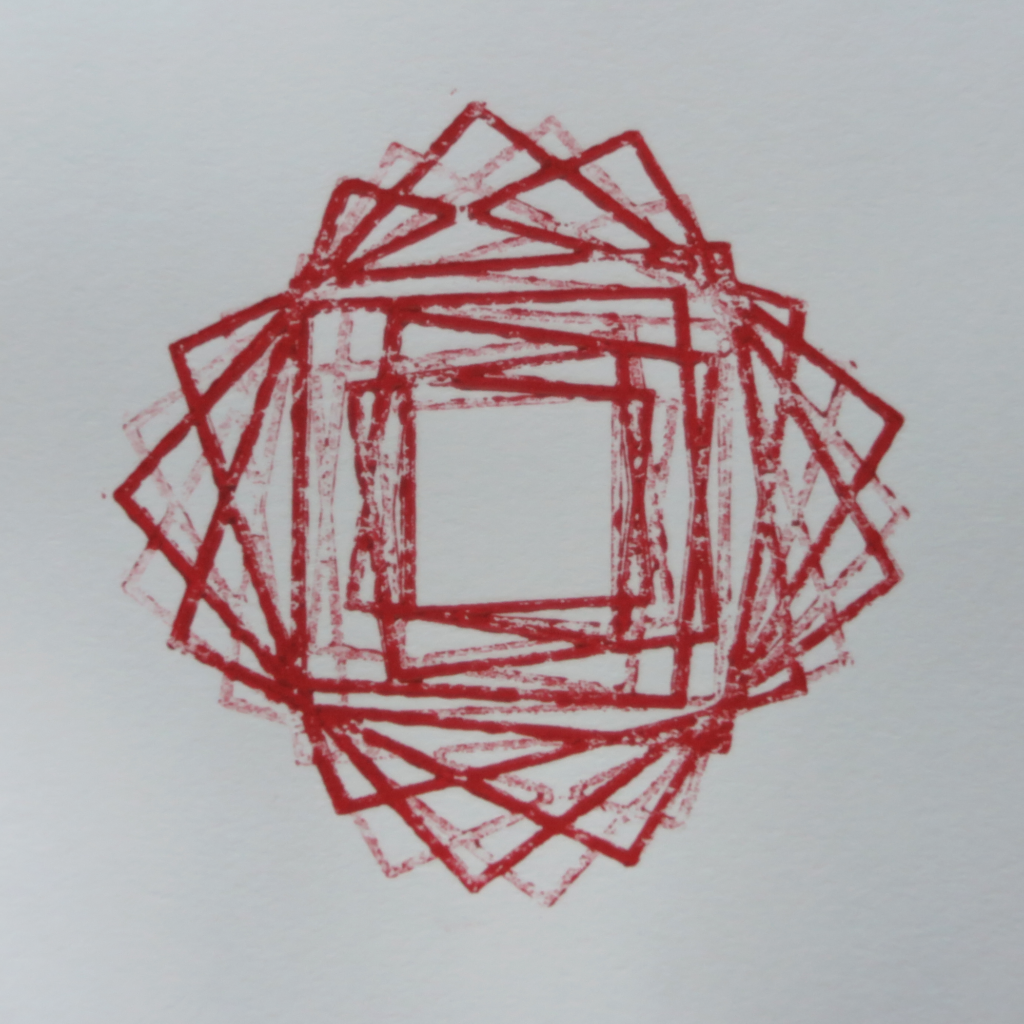
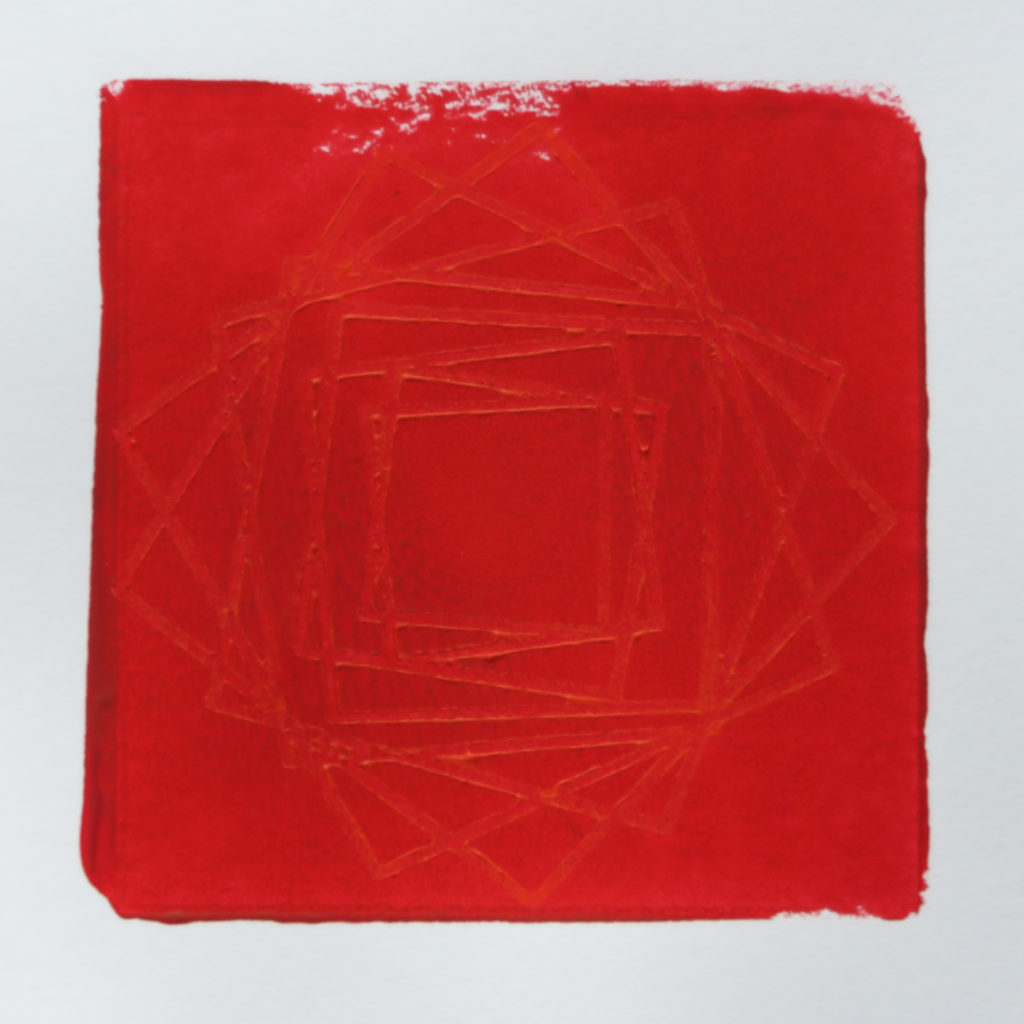
Photographs of block prints, each print 8cm square. They are made using 3d printed blocks. The designs are generated using code written in Python.












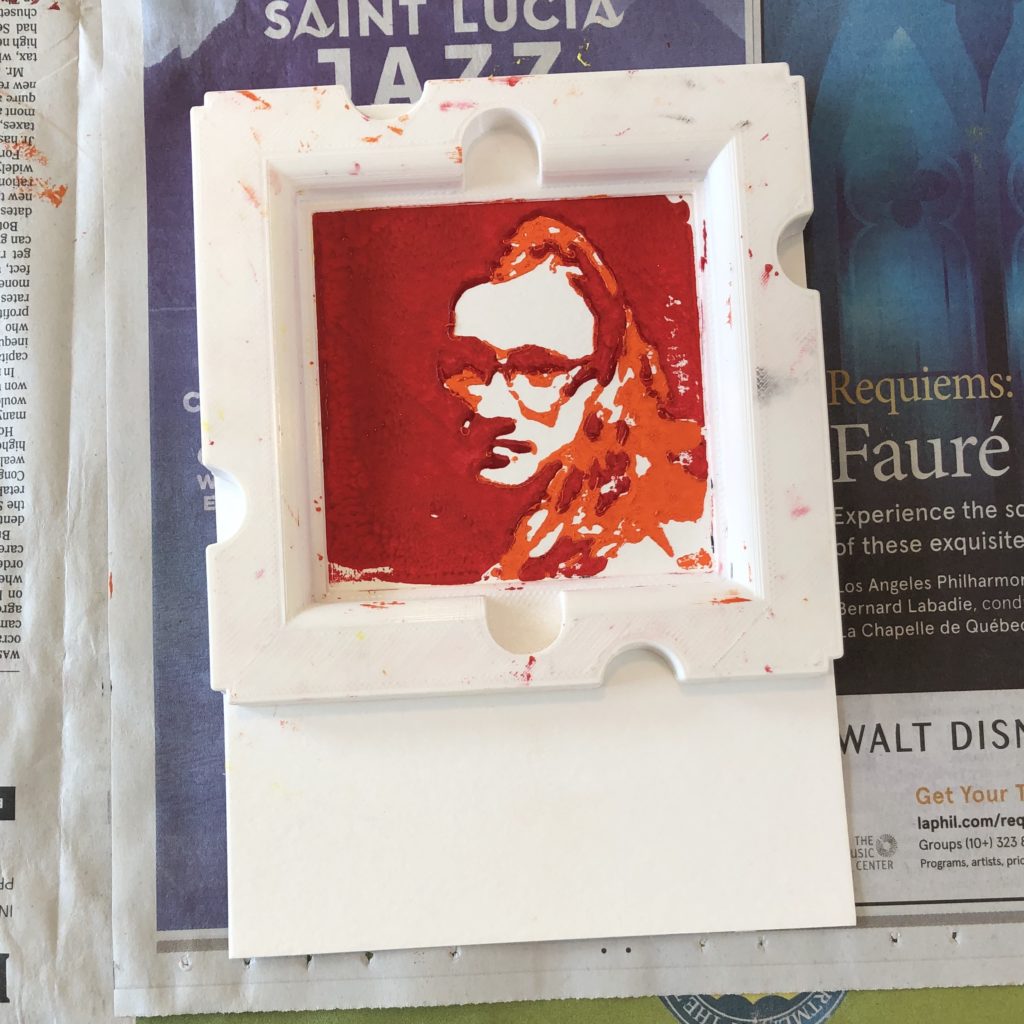
These final two images show some of the inked blocks and a print in process with a jig to guid the align the blocks.

Visualization of earthquakes in the San Francisco Bay Area. Grey value indicates the magnitude of the most recent quake (top), all quakes in the past 24 hrs (bottom), and max quake each day for the past 30 days (middle).
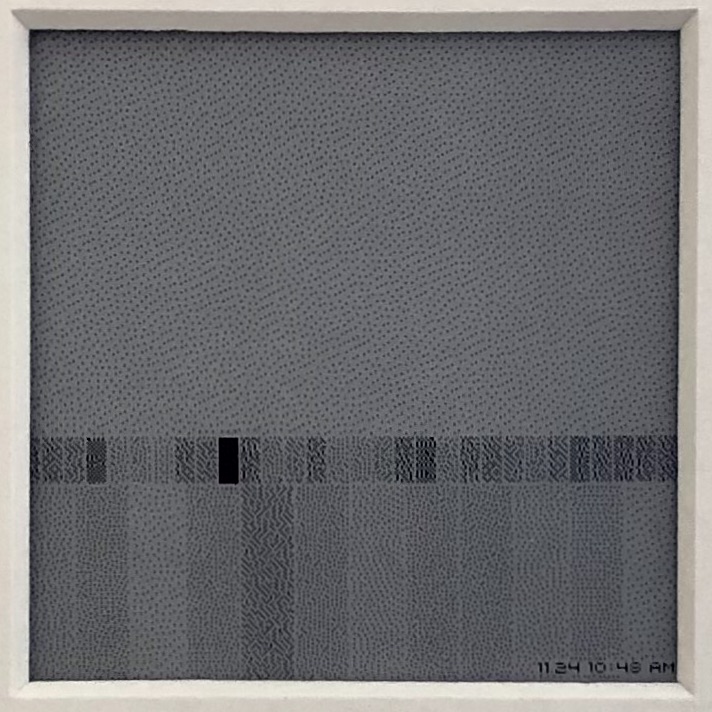
Made using a Raspberry Pi Zero W and a Pimoroni Inky wHAT, mounted in an 8 inch square frame.
